14.28 DetermineShootAtGoalPosition
This function is used to optimize the target we kick for when shooting for a goal. The function starts by looking at a position just a bit lower down than the top post of the goal VecPosition initTarget = VecPosition(HALF_FIELD_X,HALF_GOAL_Y-0.1,0);. We then iterate from this point checking if this target is obstructed using isThereObstructionBetweenTargetAndBall however in this case we use 0.25 as our threshold as we want to be a lot more strict on our bounding rectangle. These rectangles can be seen in the Figures below. If that initial target is obstructed we decrease the y-coordinate by the offset value. This process is repeated until an unobstructed target is found. When this target is found it is returned as our adjusted VecPosition. If no target can be found we then look for a valid pass recipient using DetermineValidPassRecipient with the pass back parameter enabled.
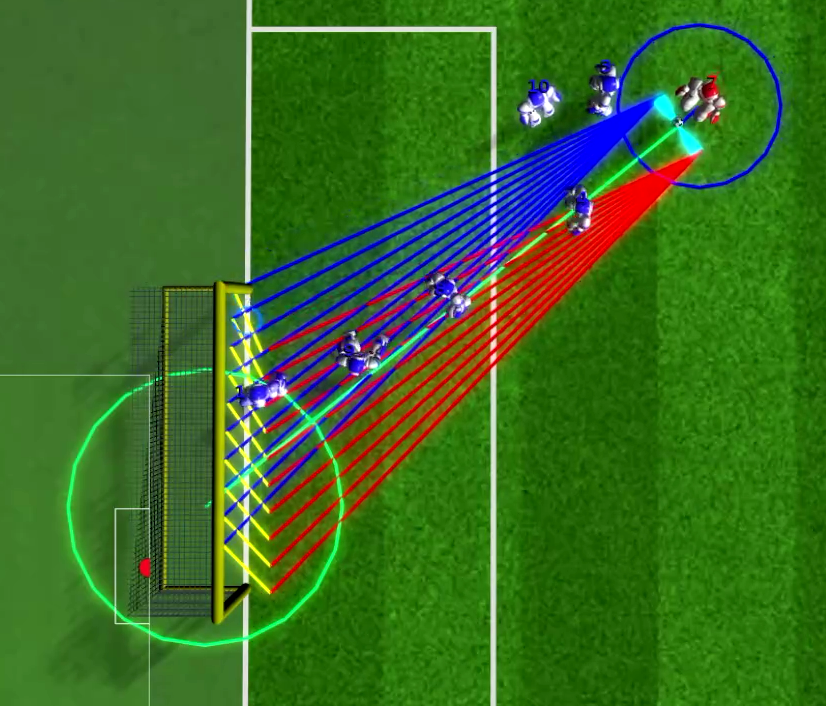
Figure 14.4: Visualisation of optimised target selection when shooting at goal depicted by small blue circle
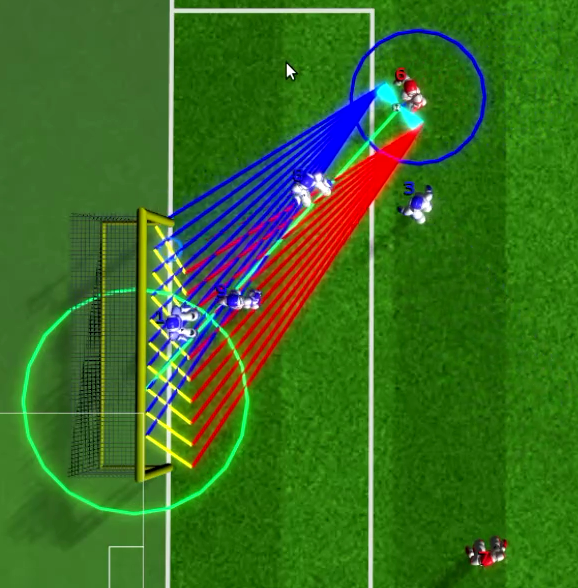
Figure 14.5: Visualisation of optimised target selection when shooting at goal depicted by small blue circle
VecPosition NaoBehavior::DetermineShootAtGoalPosition(VecPosition _myPos, int _playerNumber, vector<pair<double,int > > TeamDistToBall){
double offset = 0.2;
VecPosition initTarget = VecPosition(HALF_FIELD_X,HALF_GOAL_Y-0.1,0);
while(isThereObstructionBetweenTargetAndBall(initTarget,1,0.25)){
initTarget.setY(initTarget.getY()-offset);
if(initTarget.getY() < -HALF_GOAL_Y){
double yValue = MapValueInRangeTo(ball.getY(), -HALF_FIELD_Y, HALF_FIELD_Y, -HALF_GOAL_Y, HALF_GOAL_Y);
initTarget.setY(yValue);
return initTarget;
}
}
VecPosition Adjustedtarget = DetermineValidPassRecipient(initTarget,_myPos,_playerNumber,TeamDistToBall,true);
return Adjustedtarget;
}