10 Nao Robot Platform
Rcssserver3d comes with the Nao robot model for use by the agents in the soccer simulation. The Nao humanoid robot manufactured by Aldebaran Robotics. Its height is about 57cm and its weight is around 4.5kg. Its biped architecture with 22 degrees of freedom allows Nao to have great mobility. rcssserver3d simulates Nao nicely, as you can see. The simulated model comes with 22 degrees of freedom, which allow Nao to have great mobility. In other words they can fall over in many ways. The following information and more can be found at http://simspark.sourceforge.net/wiki/index.php/Main_Page
How do we control the robot?
- Perceptors : Sensors of the robot
- Effectors : Allow agents to perform actions
The Nao robot model is equipped with a powerful selection of perceptors and effectors to provide a widespread information base for agent development.
- The Nao robot possess a
gyroscopeand aaccelerometer, to keep track of radial as well as axial movement of itself in the three dimensional space. Both are located at the center of the torso, therefore the only available identifier to these perceptors is “torso”. - In order to detect contact with the ground or other objects in the simulation, one
force resistance perceptorin each foot indicates the actual pressure on it. Possible identifiers are “lf” and “rf”, for the left and the right foot. - To get visual information about different objects in its environment the Nao robot possess a
restricted vision perceptorat the center of its head. Note: The visual perception is described in a right hand system facing the x-axis. - For communication purposes it is equipped with a
say effectorand the correspondinghear perceptor. - The position of each joint is represented by a
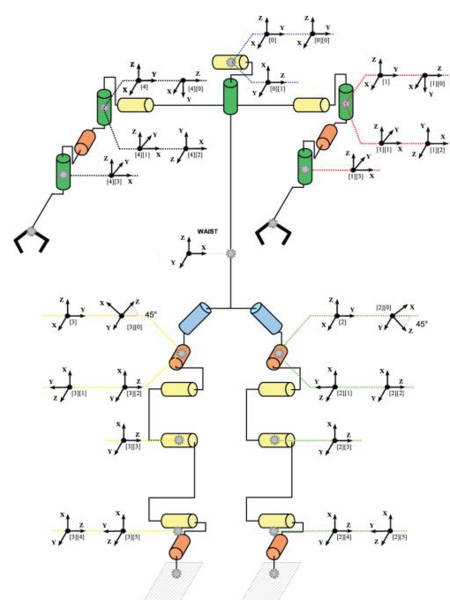
hinge joint perceptorand manipulable through the correspondinghinge joint effector. A complete list of all available joints of the Nao robot and their corresponding identifiers is listed in the table below. The arrangement of the joints and their relative orientation is shown in figureNao's anatomy. - The
gamestate perceptoris used to inform about the actual play time and play mode.
| No. | Description | Hinge Joint | Perceptor name | Effector name |
|---|---|---|---|---|
| 1 | Neck Yaw | [0][0] | hj1 | he1 |
| 2 | Neck Pitch | [0][1] | hj2 | he2 |
| 3 | Left Shoulder Pitch | [1][0] | laj1 | lae1 |
| 4 | Left Shoulder Yaw | [1][1] | laj2 | lae2 |
| 5 | Left Arm Roll | [1][2] | laj3 | lae3 |
| 6 | Left Arm Yaw | [1][3] | laj4 | lae4 |
| 7 | Left Hip YawPitch | [2][0] | llj1 | lle1 |
| 8 | Left Hip Roll | [2][1] | llj2 | lle2 |
| 9 | Left Hip Pitch | [2][2] | llj3 | lle3 |
| 10 | Left Knee Pitch | [2][3] | llj4 | lle4 |
| 11 | Left Foot Pitch | [2][4] | llj5 | lle5 |
| 12 | Left Foot Roll | [2][5] | llj6 | lle6 |
| 13 | Right Hip YawPitch | [3][0] | rlj1 | rle1 |
| 14 | Right Hip Roll | [3][1] | rlj2 | rle2 |
| 15 | Right Hip Pitch | [3][2] | rlj3 | rle3 |
| 16 | Right Knee Pitch | [3][3] | rlj4 | rle4 |
| 17 | Right Foot Pitch | [3][4] | rlj5 | rle5 |
| 18 | Right Foot Roll | [3][5] | rlj6 | rle6 |
| 19 | Right Shoulder Pitch | [4][0] | raj1 | rae1 |
| 20 | Right Shoulder Yaw | [4][1] | raj2 | rae2 |
| 21 | Right Arm Roll | [4][2] | raj3 | rae3 |
| 22 | Right Arm Yaw | [4][3] | raj4 | rae4 |
Available hinge joints of the Nao robot.