18 Past Teams
This Section contains a Description of the behavior behind some of WITS’s past winning teams.
18.0.1 Assembly AI
Winners of the first 2v2 Competition developed by Ghulame Mujtaba Arbi.
18.0.2 Public School Heroes
Winners of the second 2v2 Competition develop by Branden Ingram and Devon Jarvis. The strategy of Public School Heroes focused around transition between one of two states namely Offensive and Defensive. Early on we used a simply IsPossesion function to swap between the states, however, we quickly realised this was not complex enough to handle the variety of situations that would pop up. Most of the time agents would not swap early enough to the defensive strategy. Therefore, the DangerClose function was developed to improve these transitions.
The overview of the defensive strategy was to get in between the ball and our goal and from there on the agents could then turn and go for the ball. For this we needed to identify the midway point between our ball and the goal. It was this midway point which was where agents were told to go to. The beauty of this is that as the ball gets closer to the goal this midway point also adjusts to be closer. For all the times where we required our agent to walk to a position we utilised the SmartGoToTarget function in order to minimize the amount of fouls for charging which occurs when ramming agents from behind.
The offensive strategy centered around getting the ball to the wings and then bringing the ball in towards the goal through a mix of dribbling and passing. This was done in order to more easily get around defenders. The exact positions were dependent on the region of the field in which the ball was at a given time. A slight optimisation that was really good when in possession near our goal was to move to the wing on the opposite side of the player. The idea here being if we are above the ball, in order for us to kick upwards would require the agent moving to the bottom side of the ball. This would take up valuable time which we don’t have so close to our own goal. Passes were conducted only when they were deemed beneficial as a result of the isInNeighbourhood function. It meant that we would only pass if there was a teammate nearby our goal location for the kick otherwise we would dribble the ball there instead.
18.0.3 7 Public School Lads
Winners of the first 7 aside competition held in April 2021 develop by Branden Ingram and Devon Jarvis. Much of the behaviour was lifted from their previous 2v2 team, however a new advancement was the utilisation of an optimal positioning system.
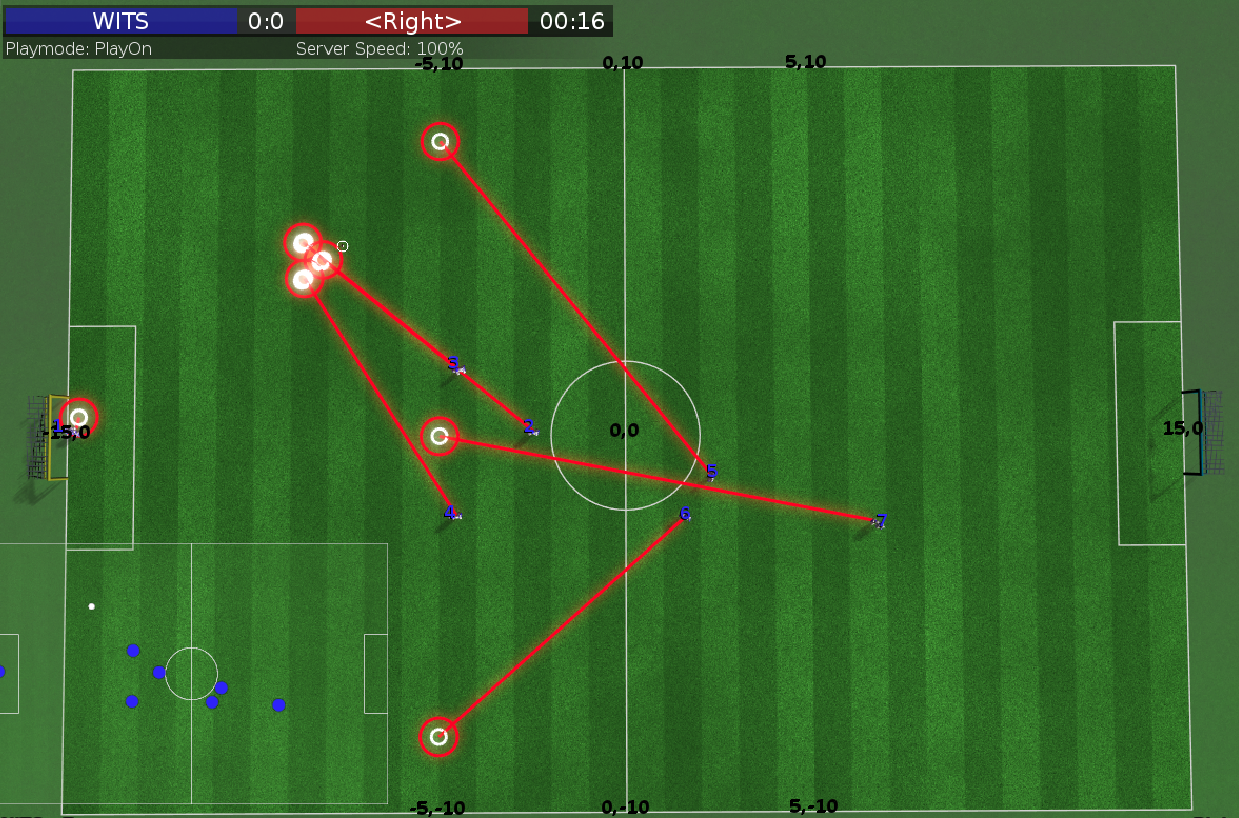
Here they look to uniquely map a role to each player on the field. they, therefore, knew that they needed to design and implement a system that uniquely mapped players to points on a field in an efficient manner. They decided to utilise the Stable Marriage algorithm, which famously matches two groups of people based on preferences for each other. They designed the preferences to be based upon how far a point was from a respective player. Therefore, ``PlayerA"’s most preferred point would be the closest point in the formation to them. In Figure 2 below we can see now that we have each agent aiming for different locations in an optimised way such that the total overall distance is minimized. They then hard coded important positions that each player should be standing given the position of the ball on the field.
18.0.4 WITS-FC 2021
Winners of the best new team award at RoboCup 2021. This team saw many developments and improvements moving from our 7 man team to a fully functioning 11 player roster. This was our first functioning 11 man team which drew from much of the lessons learnt in all previous tournaments and the teams which competed in them.
Specifically:
Formation : Hold The Line
Passing: Chandrian
Kicking: Assembled Dead AI
Goal Keeper Dive: Andries FC
Behaviour Tree: 7 Public School Lads The main advancements for this teams was the work done to optomise:
Formation Assignment
Passing
ShootingThe following Videos describe how these objectives were achieved